OpenCV3.3 has come along with better support for deep-learning. The DNN (Deep-learning Neuron Network) module has been moved from opencv_contrib repository to main repository and therefor became a standard part of OpenCV. Current release supports the backend and model IO of Caffe, TensorFlow, Torch and PyTorch. You can pick any of them to build your deep-learning powered computer vision applications, of course, with much less work to do.
This blog trys to get your hands ready for Deep Learning with OpenCV, if you are a beginner like me.
1) Remove libgtk-3-dev, use libgtk-2.0-dev instead, because libgtk-3-dev depends on libmirprotobuf-dev. As we need to recompile protobuf, any existing older version of protobuf may cause conflicts.
sudo apt-get remove libgtk-3-dev
sudo apt-get install libgtk2.0-dev
2) Remove libprotobuf-dev, libmirprotobuf-dev
sudo apt-get remove libprotobuf-dev libmirprotobuf-dev
sudo rm -rf /usr/include/google/protobuf
sudo rm -rf /usr/lib/libprotobuf*
sudo rm -rf /usr/local/include/google/protobuf
sudo rm -rf /usr/local/lib/libprotobuf*
3) Install protobuf build dependencies
sudo apt-get install autoconf automake libtool curl make g++ unzip
4) Download protobuf sources and generate configuration
git clone https://github.com/google/protobuf.git
cd protobuf
./autogen.sh
5) Configure protobuf build profile
gedit configureMake some changes from line 2659 to 2664 (line numbers depend on your source version):
Original:
if test "x${ac_cv_env_CFLAGS_set}" = "x"; then :
CFLAGS=""
fi
if test "x${ac_cv_env_CXXFLAGS_set}" = "x"; then :
CXXFLAGS=""
fi
Modified:
if test "x${ac_cv_env_CFLAGS_set}" = "x"; then :
CFLAGS="-fPIC"
fi
if test "x${ac_cv_env_CXXFLAGS_set}" = "x"; then :
CXXFLAGS="-fPIC"
fi
6) Make & Install
make -j`nproc`
sudo make install
7) Test
a) Check protobuf compiler version:
protoc --version
You should get this:

b) Check protobuf static lib installation:
ls /usr/local/lib | grep libprotobuf
You should get this:
1) Disable OpenCV and check your own python include path (with numpy)
USE_OPENCV := 0
PYTHON_INCLUDE := /usr/include/python2.7 \
/usr/local/lib/python2.7/dist-packages/numpy/core/include
2) For customizing, follow the official installation guide: http://caffe.berkeleyvision.org/installation.html
3) If errors occurs during the installation, refer to this page: http://blog.csdn.net/hongye000000/article/details/51043913
1) Download sources:
2) For more detailed information, please refer to: http://www.linuxfromscratch.org/blfs/view/svn/general/opencv.html
3) In opencv-3.3.0/modules/python/python2/CmakeLists.txt, add one line:
if(NOT PYTHON2_INCLUDE_PATH OR NOT PYTHON2_NUMPY_INCLUDE_DIRS)
ocv_module_disable(python2)
endif()
set(the_description "The python2 bindings")
set(MODULE_NAME python2)
# Buildbot requires Python 2 to be in root lib dir
set(MODULE_INSTALL_SUBDIR "")
set(PYTHON PYTHON2)
include(../common.cmake)
# line added. Don’t diretly copy and paste, use your own caffe path
include_directories(/home/bj/caffe/distribute/include)
unset(MODULE_NAME)
unset(MODULE_INSTALL_SUBDIR)
4) CMake options
cmake -DCMAKE_BUILD_TYPE=Release -
DOPENCV_EXTRA_MODULES_PATH=<opencv_contrib/modules> -
DCaffe_INCLUDE_DIR=~/caffe/distribute/include -
DCaffe_LIB_DIR=~/caffe/distribute/lib -
DENABLE_PRECOMPILED_HEADERS=OFF -DBUILD_PERF_TESTS=OFF -
DBUILD_TESTS=OFF -DENABLE_CXX11=ON -DBUILD_opencv_python2=ON
5) Make & Install
First, clean old opencv header files and libs:
sudo apt-get remove libopencv-dev
sudo rm /usr/local/include/opencv* -rf
sudo rm /usr/local/lib/libopencv*
In your cmake build directory:
make -j4
sudo make installa) For Python user:
# please refer to: http://www.pyimagesearch.com/2017/08/21/deep-learning-with-opencv/
# for detail
import numpy as np
import argparse as ap
import time
import cv2
# parse command line arguments
arp = ap.ArgumentParser()
arp.add_argument("-i", "--image", required=False,
help="path to input image")
arp.add_argument("-p", "--prototxt", required=True,
help="path to Caffe 'deploy' prototxt file")
arp.add_argument("-m", "--model", required=True,
help="path to Caffe pretrained model")
arp.add_argument("-l", "--labels", required=True,
help="path to ImageNet labels (i.e., syn-sets)")
args = vars(arp.parse_args())
# Use live demo if image is not given
cap = cv2.VideoCapture()
if (args["image"] is None) :
cap.open(0)
else :
cap.open(args["image"])
if (cap.isOpened() == False) :
print("ERROR: Fail to capture")
exit(0)
# set opencv video capture properties
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 224)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 224)
# load labels
rows = open(args["labels"]).read().strip().split("\n")
classes = [r[r.find(" ") + 1:].split(",")[0] for r in rows]
# load model
print("[INFO] loading model...")
net = cv2.dnn.readNetFromCaffe(args["prototxt"], args["model"])
# loop
while True:
# read new frame
ret, image = cap.read()
if (image is None) : break
# create blob from image
blob = cv2.dnn.blobFromImage(image, 1, (224, 224), (104, 117, 123))
# assign net input
net.setInput(blob)
# time before forwarding
start = time.time()
# forward
preds = net.forward()
# time after forwarding
end = time.time()
# show classification time cost
print("[INFO] classification took {:.5} seconds".format(end - start))
# find the top 3 scored classes
idxs = np.argsort(preds[0])[::-1][:3]
for (i, idx) in enumerate(idxs):
# mark the top one
if i == 0:
text = "Label: {}, {:.2f}".format(classes[idx], preds[0][idx])
cv2.putText(image, text, (5, 25), cv2.FONT_HERSHEY_SIMPLEX,
0.7, (0, 0, 255), 2)
# for each class in top 3, print the info
print("[INFO] {}. label: {}, probability: {:.5}".format(i + 1,
classes[idx], preds[0][idx]))
# show image
cv2.imshow("cvdnn_py", image)
cv2.waitKey(1)
# before exiting
cv2.waitKey(0)
cap.release()
cv2.destroyAllWindows()
# end of file
Command line:
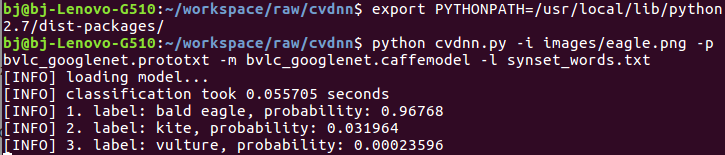
Result:

b) For C++ user:
#include <opencv2/opencv.hpp>
#include <opencv2/dnn.hpp>
#include
#include
#include
#include
// command line help
void help()
{
std::cout << "Usage: cvdnn " << std::endl;
}
// load labels from file
bool load_labels(const std::string &path, std::vector &labels)
{
std::ifstream label_stream(path.c_str());
if (!label_stream)
return false;
while (!label_stream.eof())
{
std::string line;
std::getline(label_stream, line);
size_t label_beg_idx = line.find(" ") + 1;
size_t label_end_idx = line.find(",", label_beg_idx + 1);
if (label_end_idx == std::string::npos)
label_end_idx = line.length();
size_t label_len = label_end_idx - label_beg_idx;
std::string label = line.substr(label_beg_idx, label_len);
labels.push_back(label);
}
label_stream.close();
return true;
}
int main(int argc, char **argv)
{
if (argc != 5)
{
help();
return -1;
}
// std string for each argument
std::string image_path(argv[1]);
std::string proto_path(argv[2]);
std::string model_path(argv[3]);
std::string label_path(argv[4]);
// load labels from file
std::vector labels;
if (!load_labels(label_path, labels))
{
std::cout << "ERROR: cannot open label file: " << label_path << std::endl;
return -1;
}
// read image
cv::Mat image = cv::imread(image_path);
if (image.empty())
{
std::cout << "ERROR: cannot open image file: " << image_path << std::endl;
return -1;
}
// create blob from image
cv::Mat blob = cv::dnn::blobFromImage(image, 1, cv::Size(224, 224), cv::Scalar(104, 117, 123));
// read net from caffe
cv::dnn::Net net = cv::dnn::readNetFromCaffe(proto_path, model_path);
// set net input
net.setInput(blob);
// time tick before forwarding
double t = cv::getTickCount();
// forward
cv::Mat probs = net.forward();
// calculate time cost
t = (cv::getTickCount() - t) / cv::getTickFrequency();
// show forward time cost
std::cout << "[INFO] classification took " << (int)t << " seconds" << std::endl;
// debug
//std::cout << "[INFO] probs.rows: " << probs.rows << ", probs.cols: " << probs.cols << std::endl;
// sort result
cv::Mat idxs;
cv::sortIdx(probs, idxs, cv::SORT_EVERY_ROW + cv::SORT_DESCENDING);
// debug
//std::cout << "[INFO] idxs.rows: " << idxs.rows << ", idxs.cols: " << idxs.cols << std::endl;
// show the top 3 scored classes
for (int i = 0; i < 3; i++)
{
int idx = idxs.at(0, i);
std::string label = labels[idx];
float prob = probs.at(0, idx);
std::stringstream ss;
ss << label << ": " << prob;
std::string text = ss.str();
std::cout << "[INFO] " << (i + 1) << ". " << text << std::endl;
if (i == 0)
cv::putText(image, text, cv::Size(5, 25), cv::FONT_HERSHEY_SIMPLEX, 0.7, cv::Scalar(0, 0, 255), 2);
}
cv::imshow("cvdnn_cpp", image);
cv::waitKey(0);
cv::destroyAllWindows();
return 0;
}
// end of file
Command line:

Result:

The example code and dataset above were mostly borrowed from Deep Learning with OpenCV Tutorials By Adrian Rosebrock and restored in github.

帮杰
疯狂于web和智能设备开发,专注人机互联。



HOW DO I DIY MY OWN REMOTE CONTROL SWITCH IN MY DORMITORY

THE SIMPLEST KALMAN FILTER IN THE WORLD

COMPUTING MEAN AND VARIANCE RECURSIVELY
LEARNING GOOGLE TENSORFLOW [L1: MAKE THE FIRST ACUAINTANCE]